






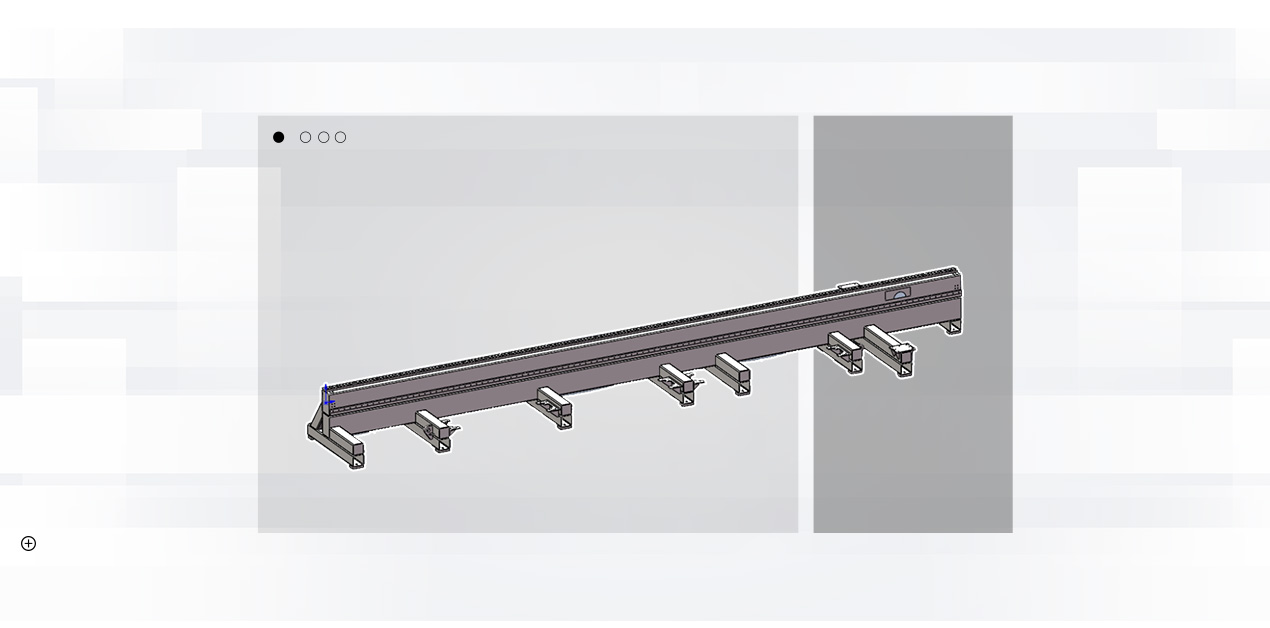
ဘေးတွင်ချိတ်ဆွဲထားသောဖွဲ့စည်းပုံ-တစ်ပိုင်းတည်း-ဂဟေဆက်ထားသော-ကုတင်
အိပ်ယာသည် ဘေးတွင်ချိတ်ဆွဲထားသောဖွဲ့စည်းပုံနှင့် အပိုင်းတစ်ပိုင်းတည်းသော ဂဟေဆက်အိပ်ယာကို အသုံးပြုထားပြီး အတွင်းပိုင်းဖိအားကို ဖယ်ရှားရန် အပူပေးထားသည်။ ကြမ်းတမ်းသော စက်ဖြင့်ပြုလုပ်ပြီးနောက်၊ စက်ဖြင့်ပြုလုပ်ခြင်းမပြုမီ တုန်ခါမှုအိုမင်းခြင်းကို ပြုလုပ်သောကြောင့် စက်ကိရိယာ၏ မာကျောမှုနှင့် တည်ငြိမ်မှုကို သိသိသာသာတိုးတက်စေပြီး စက်ကိရိယာ၏ တိကျမှုကို သေချာစေသည်။ AC servo motor drive ကို numerical control system မှ ထိန်းချုပ်ထားပြီး chuck သည် မော်တာမောင်းနှင်ပြီးနောက် Y ဦးတည်ချက်တွင် အပြန်အလှန်ရွေ့လျားမှုကို သိရှိပြီး မြန်ဆန်သောရွေ့လျားမှုနှင့် feeding ရွေ့လျားမှုကို သိရှိသည်။ Y-axis rack နှင့် linear guide rail နှစ်ခုလုံးကို မြင့်မားသောတိကျမှုရှိသော ထုတ်ကုန်များဖြင့် ပြုလုပ်ထားပြီး ဂီယာ၏တိကျမှုကို ထိရောက်စွာအာမခံသည်။ stroke ၏ အဆုံးနှစ်ဖက်စလုံးရှိ limit switch များကို ထိန်းချုပ်ထားပြီး hard limit device တစ်ခုကို တစ်ပြိုင်နက်တည်း တပ်ဆင်ထားသောကြောင့် စက်ကိရိယာလှုပ်ရှားမှု၏ ဘေးကင်းမှုကို ထိရောက်စွာသေချာစေသည်။ စက်ကိရိယာတွင် အလိုအလျောက်ချောဆီလိမ်းသည့်ကိရိယာတပ်ဆင်ထားပြီး ရွေ့လျားနေသော အစိတ်အပိုင်းများ ကောင်းမွန်သောအခြေအနေတွင် လည်ပတ်နိုင်စေရန်အတွက် အိပ်ယာ၏ ရွေ့လျားနေသော အစိတ်အပိုင်းများသို့ ပုံမှန်ကြားကာလများတွင် ချောဆီလိမ်းပေးကာ လမ်းညွှန် rail များ၊ ဂီယာများနှင့် rack များ၏ ဝန်ဆောင်မှုသက်တမ်းကို တိုးတက်စေနိုင်သည်။
ရှေ့-အစာကျွေး-ကိရိယာ
ရှေ့အစာကျွေးသည့်ကိရိယာတွင် လေဆလင်ဒါဖြင့် ထိန်းချုပ်ထားသော အထောက်အပံ့ပြားတစ်ခု ပါဝင်ပြီး ဖြတ်ထားသောပိုက်သည် ရှည်လျားသည့်အခါ ပိုက်ကို ထောက်ပံ့ပေးပြီး တွဲကျခြင်းမှ ကာကွယ်ပေးသည်။
အလုပ်အပိုင်းကို ဖြတ်တောက်နေချိန်တွင် မြှင့်ထားသော ထောက်ပံ့မှုဆလင်ဒါသည် ပိုက်ကိုထောက်ပံ့ရန် ထောက်ပံ့မှုပြားကို ထောက်ပံ့ပေးပြီး ပြုတ်ကျခြင်းမှ ကာကွယ်ပေးသည်။ အလုပ်အပိုင်းကို ဖြတ်တောက်သောအခါ မြှင့်ထားသော ထောက်ပံ့မှုဆလင်ဒါများအားလုံးကို ပြန်ရုပ်သိမ်းပြီး အလုပ်အပိုင်းသည် ပြားပေါ်သို့ ပြုတ်ကျပြီး သိုလှောင်ရာနေရာသို့ လျှောကျသွားသည်။ ဆလင်ဒါလုပ်ဆောင်ချက်ကို စနစ်မှ အလိုအလျောက် ထိန်းချုပ်သည်။
ရှေ့ပိုင်းကို နောက်ဆက်တွဲအမျိုးအစားနှင့် ကိုယ်တိုင်ချိန်ညှိမှုအမျိုးအစားအဖြစ်လည်း ခွဲခြားထားသည်။

ပံ့ပိုးမှု-ယန္တရားများ
ကုတင်ပေါ်တွင် ထောက်ပံ့ရေးယန္တရား ၃ စုံ တပ်ဆင်ထားပြီး အမျိုးအစားနှစ်မျိုး ရရှိနိုင်ပါသည်-
၁။ နောက်ဆက်တွဲထောက်ပံ့မှုကို လွတ်လပ်သော servo မော်တာဖြင့် အပေါ်အောက် ရွေ့လျားစေရန် ထိန်းချုပ်ထားပြီး၊ အဓိကအားဖြင့် ရှည်လျားသောပိုက်များ (အချင်းသေးငယ်သောပိုက်များ) ပုံပျက်ခြင်းအတွက် နောက်ဆက်တွဲထောက်ပံ့မှုကို ဆောင်ရွက်ရန်ဖြစ်သည်။ နောက်ဘက် chuck သည် သက်ဆိုင်ရာနေရာသို့ ရွေ့လျားသောအခါ၊ ရှောင်ရှားရန် အရန်ထောက်ပံ့မှုကို နှိမ့်ချနိုင်သည်။
၂။ ပြောင်းလဲနိုင်သော အချင်းဘီးထောက်ပံ့မှုကို ဆလင်ဒါဖြင့် မြှင့်တင်နှိမ့်ချပြီး၊ အရွယ်အစားအမျိုးမျိုးရှိသော ပိုက်များကို ထောက်ပံ့ရန် မတူညီသော စကေးအနေအထားများသို့ လက်ဖြင့် ချိန်ညှိနိုင်သည်။
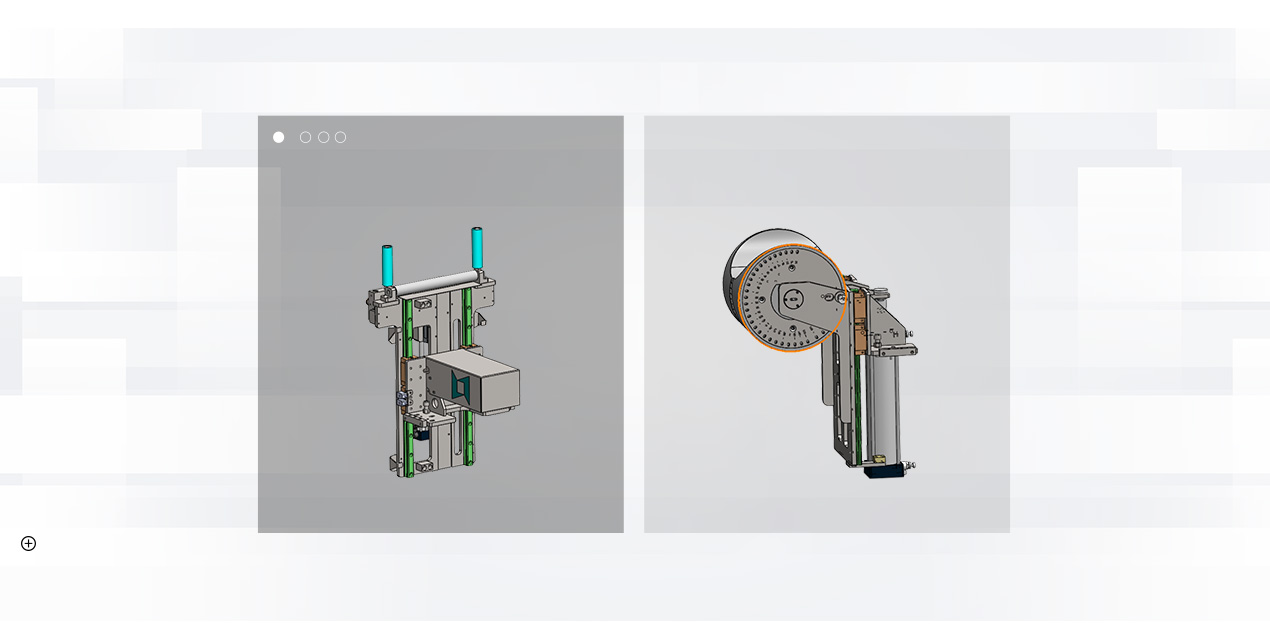
ချပ်-အပိုင်း
ချပ်ကို ရှေ့နှင့်နောက် လေဖိအားအပြည့်ပါသော ချပ်နှစ်ခုအဖြစ် ပိုင်းခြားထားပြီး နှစ်ခုစလုံးသည် Y ဦးတည်ချက်အတိုင်း ရွေ့လျားနိုင်သည်။ နောက်ဘက်ချပ်သည် ပိုက်ကို ညှပ်ခြင်းနှင့် အစာကျွေးခြင်းအတွက် တာဝန်ရှိပြီး ရှေ့ချပ်ကို ပစ္စည်းများညှပ်ရန်အတွက် ကုတင်၏အဆုံးတွင် တပ်ဆင်ထားသည်။ ရှေ့နှင့်နောက်ချပ်များကို တစ်ပြိုင်နက်လည်ပတ်မှုရရှိစေရန် servo မော်တာများဖြင့် အသီးသီးမောင်းနှင်သည်။
နှစ်ထပ်ချပ်များ၏ အဆစ်ညှပ်မှုအောက်တွင် အမြီးတိုများကို ဖြတ်တောက်နိုင်ပြီး ပါးစပ်၏ အမြီးတိုသည် 20-40 မီလီမီတာအထိ ရောက်ရှိနိုင်ပြီး ရှည်လျားသော အမြီး၏ အမြီးတိုများကို ဖြတ်တောက်ခြင်းကို ပံ့ပိုးပေးပါသည်။
TN စီးရီးပိုက်ဖြတ်တောက်စက်သည် ချပ်လှုပ်ရှားမှုနှင့် ရှောင်ရှားခြင်းနည်းလမ်းကို အသုံးပြုထားပြီး၊ ၎င်းသည် ချပ်နှစ်ခုဖြင့် အချိန်တိုင်းဖြတ်တောက်ခြင်းကို လုပ်ဆောင်နိုင်ပြီး ပိုက်ကို ရှည်လျားလွန်းခြင်းနှင့် မတည်မငြိမ်ဖြစ်ခြင်း မဖြစ်စေဘဲ တိကျမှုလည်း မလုံလောက်ပါ။

ဝင်ရိုး-ကိရိယာ
X-axis ကိရိယာ၏ crossbeam သည် လေးထောင့်ပြွန်နှင့် သံမဏိပြားပေါင်းစပ်၍ ဂဟေဆော်ထားသော gantry ဖွဲ့စည်းပုံကို အသုံးပြုသည်။ gantry အစိတ်အပိုင်းကို bed ပေါ်တွင်တပ်ဆင်ထားပြီး X-axis ကို servo motor ဖြင့် မောင်းနှင်ကာ slide plate ၏ X ဦးတည်ချက်သို့ အပြန်အလှန်ရွေ့လျားမှုကို ဖြစ်ပေါ်စေရန် rack နှင့် pinion ကို မောင်းနှင်သည်။ ရွေ့လျားမှုလုပ်ငန်းစဉ်တွင် limit switch သည် စနစ်လည်ပတ်မှု၏ ဘေးကင်းမှုကို သေချာစေရန် အနေအထားကို ကန့်သတ်ရန် stroke ကို ထိန်းချုပ်သည်။
တစ်ချိန်တည်းမှာပင်၊ X/Z ဝင်ရိုးတွင် အတွင်းပိုင်းဖွဲ့စည်းပုံကို ကာကွယ်ရန်နှင့် ပိုမိုကောင်းမွန်သော ကာကွယ်မှုနှင့် ဖုန်မှုန့်ဖယ်ရှားရေးအာနိသင်များ ရရှိစေရန်အတွက် ၎င်း၏ကိုယ်ပိုင် အင်္ဂါအဖုံးရှိသည်။
Z-ဝင်ရိုးကိရိယာသည် လေဆာခေါင်း၏ အပေါ်အောက်လှုပ်ရှားမှုကို အဓိကအားဖြင့် သဘောပေါက်သည်။
Z-axis ကို ၎င်း၏ကိုယ်ပိုင် interpolation လှုပ်ရှားမှုကို လုပ်ဆောင်ရန် CNC axis အဖြစ်အသုံးပြုနိုင်ပြီး တစ်ချိန်တည်းမှာပင် X နှင့် Y axis များနှင့် ချိတ်ဆက်နိုင်သည့်အပြင် မတူညီသောအခြေအနေများ၏ လိုအပ်ချက်များကို ဖြည့်ဆည်းရန် follow-up control သို့လည်း ပြောင်းလဲနိုင်သည်။
သတ္တုပိုက်ဖိုက်ဘာလေဆာဖြတ်တောက်စက် 62TN အားသာချက်များ

-

အလူမီနီယမ်အတွက် TX124 2024 ဖိုက်ဘာလေဆာဖြတ်တောက်စက်...
-
LX82TS ၇% လျှော့စျေး ၁kw ၁.၅kw ၃kw ၄kw ၆kw ဖိုက်ဘာ...
-

LX123TX အကောင်းဆုံး Three Chuck Heavy-duty Fiber Laser...
-

LX3015E သတ္တုပြားဖိုက်ဘာလေဆာဖြတ်စက် အပိုပစ္စည်းပါ...
-

LX62TN တစ်ပိုင်းအလိုအလျောက် အစာကျွေးသည့် ဖိုက်ဘာလေဆာ သတ္တု...
-

LX62TD 1-6KW စီးပွားရေးအရ ပိုက်ဖြတ်တောက်စက် P...











